
|
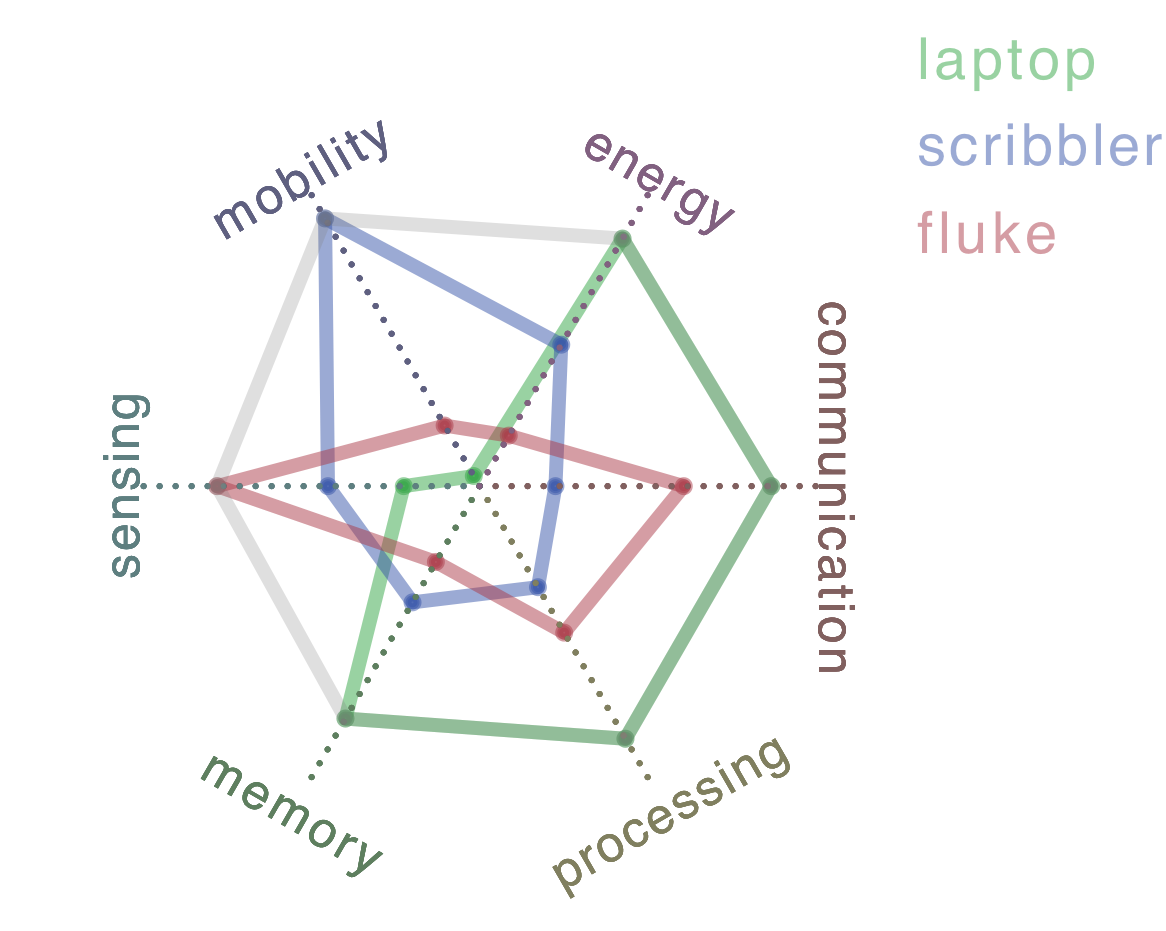
Robot Systems Architecture A perspective based on robot systems architecture enables and elucidates novel trade-offs, not obvious in traditional approaches to the design and implementation of robot systems. As evidence for the utility of this perspective, we developed and analyzed three distributed robot architectures for tasks as varied as energy-aware search and rescue, computing education, and multi-robot foraging. By architecture we are not only including the organization and guiding principles of the software, but also the interface, organization, and implementation of the underlying hardware. In each case study, the software, as well as the computation, communication, sensing, and actuation resources are organized to satisfy design objectives in terms of performance, energy, or cost. We developed "Design constellations" as a method of not only supporting comparison between platforms, but also allowing architects to interactively explore design trade-offs. |