
|
Massively Multi-Robot Systems We have shown how a heterogeneous system composed of many small, embedded, communication nodes and mobile robots equipped with sensors and manipulators can accomplish tasks such as navigation, coverage, and multi-robot foraging. This heterogeneous system of embedded devices and mobile robots puts a natural constraint on the design space of multi-robot systems. The embedded network serves as a pervasive communication, computation, sensing, and coordination fabric, while the mobile robots provide sensing and actuation. We get most of the benefits of a pervasive robot swarm but in a much cheaper, more manageable, way than with a fully mobile swarm. |
|
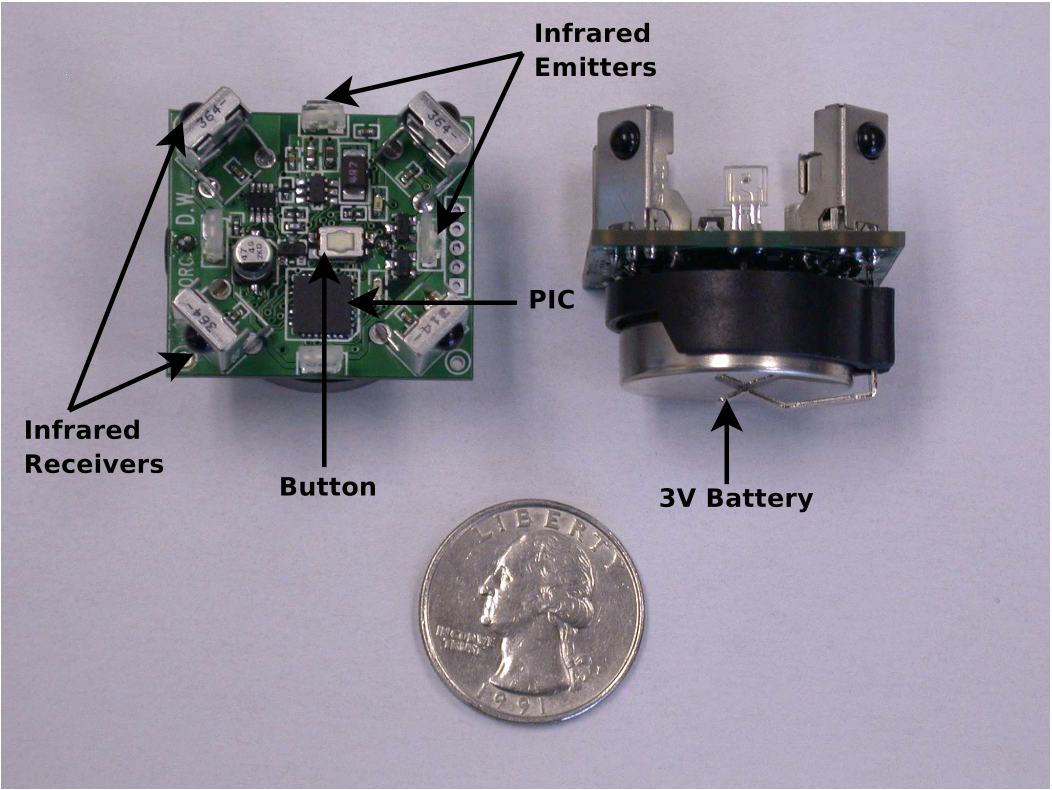
Along with simulation, we also conducted a study of "physical path planning" using a real network of embedded nodes. The idea was to use a pervasive network, or swarm, of minimal computing, communicating, and possibly sensing devices to plan paths for mobile robots. Neither the network nodes, or the mobile robots, need to know their positions or build any kind of map. In this type of physical path planning, the embedded nodes act as vertices and communication links represent unit-cost edges. For this study we implemented a new hardware platform, the Gnats. The simplicity of the platform made it inexpensive (less than $30), allowing us to conduct some of the largest experiments to date. |