
 |
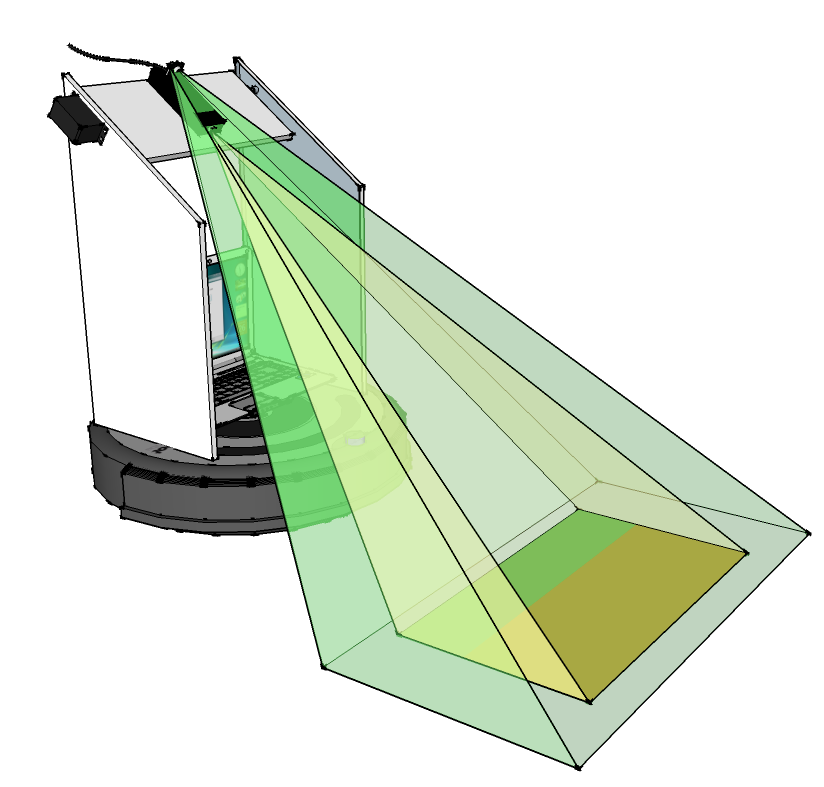
The IMP The IMP (Intelligent Mobile Projector) is an experiment in novel forms of mixed-reality and human robot interaction by combining recent advances in mobile robot and projector-camera systems research. Adding mobility to a projector-camera system enables a new class of mixed-reality interfaces. For example, how can we use autonomy as a key ingredient in augmented reality applications? Or can we use controlled mobility to create large expansive surfaces of interaction? Likewise, adding a projector-camera system to a mobile robot adds a new dimension for human-robot interaction. The IMP is able to project almost anywhere using its pan-tilt-move interface. |
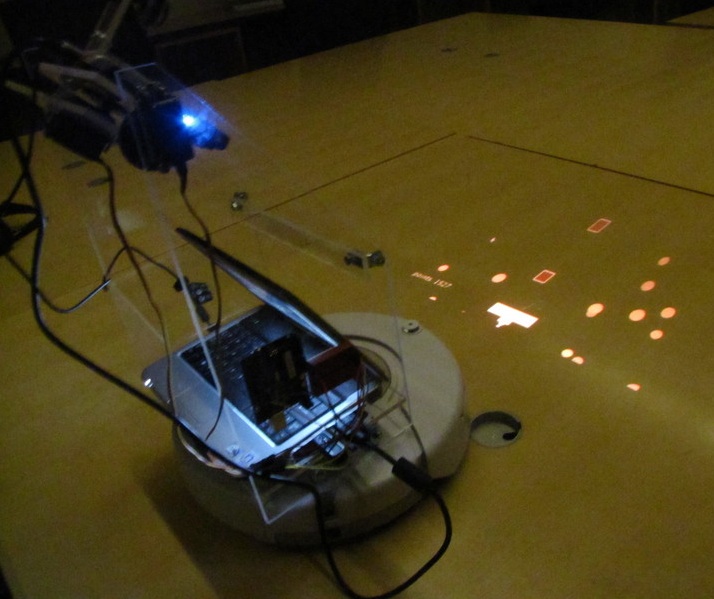 |
version 1.0 The first iteration was composed of an iRobot Create robot, two pan-tilt servo motors, a Dell netbook, a Logitech webcam, a Microvision laser pico projector, and a laser pointer. The software was written in the Processing development environment. Altogether, the platform cost around $1000. http://code.google.com/p/the-imp/ |
 |
version 2.0 The latest iteration of the platform replaced the Logitech webcam with another projector-camera system, the Microsoft Kinect. This system is able to use the depth-sensing of the Kinect to automatically locate projection surfaces and perform other geometric-intensive operations (e.g., keystone correction, homography estimation, etc.). |